How Physical AI is Enabling Pallet Movement Automation

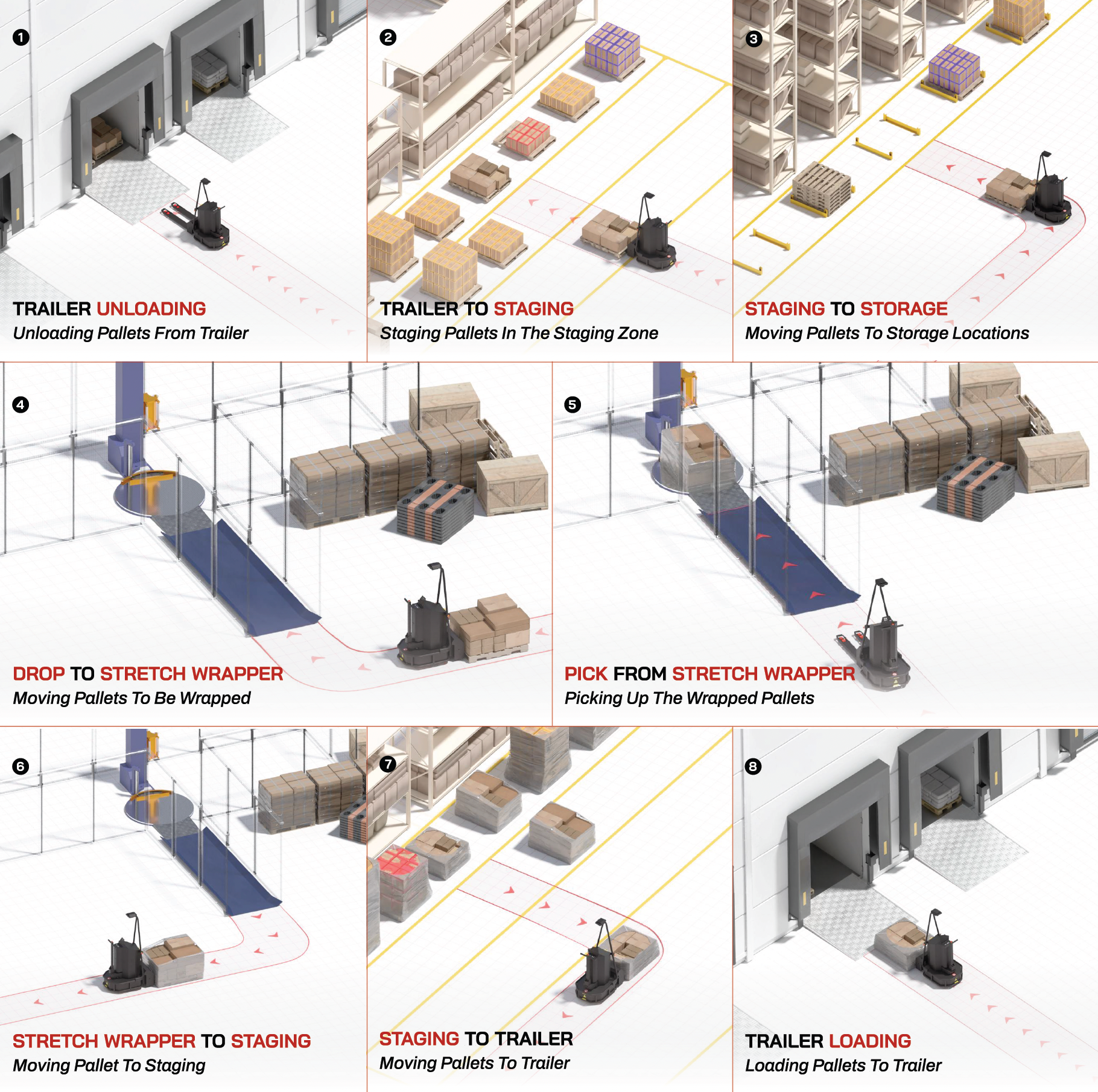
In a 3PL sort center or distribution facility, pallet movement isn’t a side task, it’s the operation. Trailer unloading to staging. Staging to storage. Storage to processing. Finished goods to wrapping to outbound docks and loading. Every pallet that doesn’t move on time creates a ripple: a trailer waiting at the dock, a sorting line sitting idle, a shipment missing its window. The throughput of the entire facility is, in many ways, the throughput of its pallet flow.
It’s also the lowest-hanging fruit for automation. There’s no complex assembly, no precision tooling, no quality inspection involved. It’s repetitive, physically demanding, and exactly the kind of work that most warehouse workers don’t want to do and that facilities are increasingly struggling to hire for. By every logic, this should have been automated a long time ago.
And yet, in the vast majority of facilities, it’s still entirely manual. Operators on pallet jacks, shift after shift, moving thousands of loads a day. Not because automation technology hasn’t existed, but because the economics have never worked. Once you factored in the cost of the robots, implementation and integration, workforce retraining, operational restructuring, and the limited throughput gains these solutions delivered, the math simply didn’t work. Existing automation technologies required so many modifications to infrastructure and operations just to make a single use-case functional that the total project cost could never be justified, especially for small and mid-sized operations or facilities running on brownfield infrastructure.
And brownfield is the reality for most 3PLs operating in the US. The vast majority of 3PL warehouses are not purpose built for automation, they’re leased or inherited facilities with fixed layouts, aging infrastructure, and floor plans designed for manual operations decades ago. These facilities weren’t set up with embedded guide systems, dedicated automation lanes, or standardized floor surfaces in mind. They’re working buildings that need to keep running while any change happens around them. At the same time, the labor economics are pushing in the other direction: 70% of 3PLs reported rising labor costs in the past year, with labor now accounting for over 40% of total operating expenses for more than half the industry. Nearly half of 3PL warehouses identify finding and retaining qualified workers as one of their top two operational challenges.
This is the gap that Physical AI is beginning to close. A new generation of mobile robots powered by the convergence of vision systems, AI, and real-time learning from human operators, making it possible to automate pallet movement without requiring any modifications to facility infrastructure or any changes to existing operations and workflows. No IT overhaul. No operational redesign. And critically, not just for a single point-to-point use-case, but with the potential to extend across the full range of pallet movement workflows that keep a facility running. From trailer unloading to outbound loading and everything in between. The technology is designed to adapt to the operation, rather than demanding the operation adapt to the technology.
Why the “Simplest” Task Was the Hardest to Automate
Pallet movement looks simple from the outside: pick up a pallet, move it from one place to another, put it down. But for traditional automation, that simplicity was deceptive. The problem was never the movement itself, it was everything the facility and the team had to change before the movement could happen autonomously. Those changes fell into two categories, and together they made automation economically unviable for most operations.
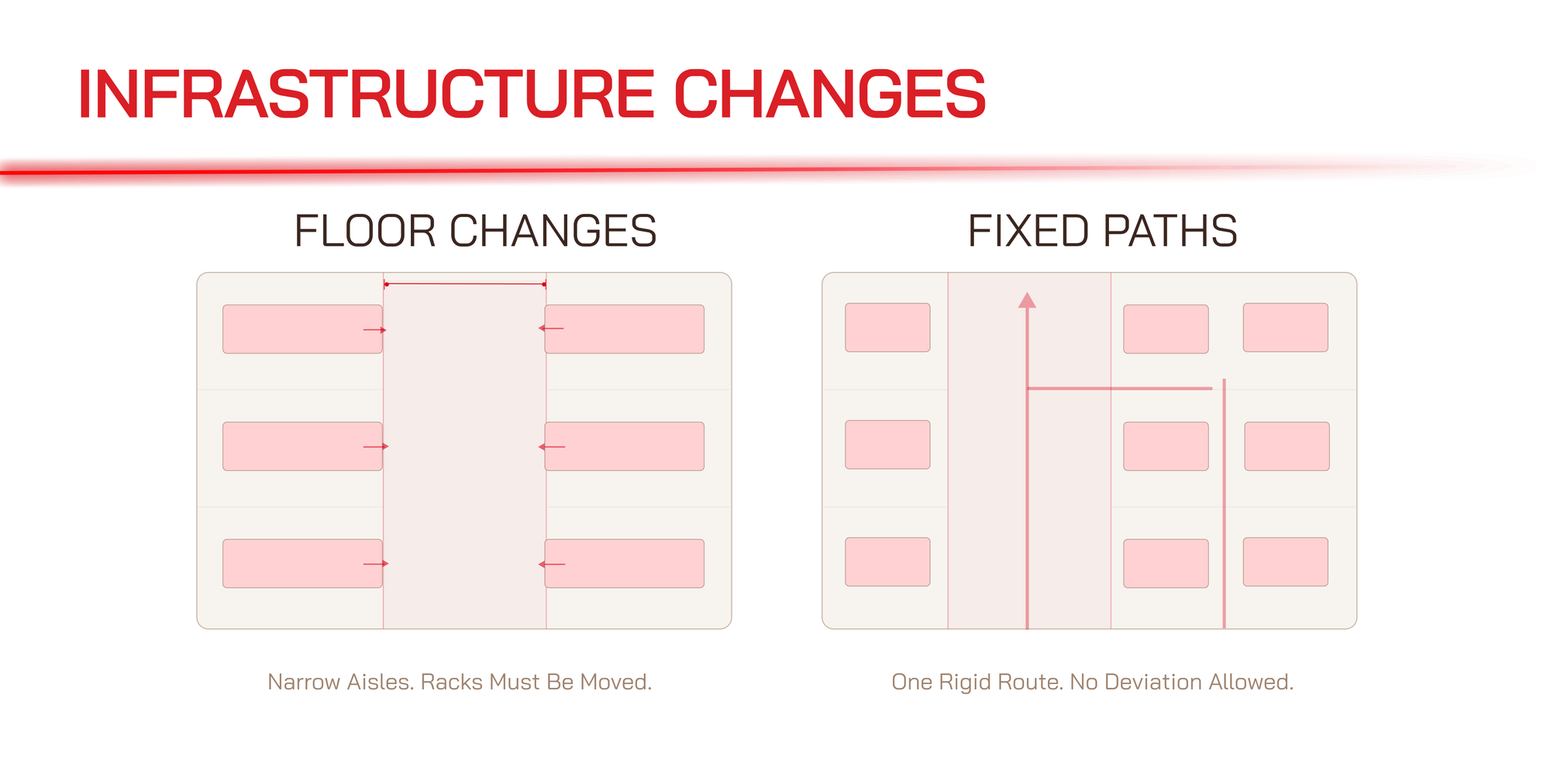
The infrastructure problem. Traditional automation technologies, from conveyor systems to guided vehicles and autonomous mobile robots (AMRs), required the facility to physically change for the robot. That meant modifying floors, installing fixed path infrastructure, mounting navigation hardware, and often reconfiguring aisle layouts and staging areas. For a 3PL operating in a leased or inherited brownfield warehouse, these modifications were often impractical. Even where modifications were physically possible, they locked the facility into rigid automation paths. When a customer’s requirements changed, when seasonal volumes shifted staging configurations, or when a new product line required different flow patterns, the installed infrastructure couldn’t adapt. The facility had to be re-modified, or the automation abandoned.
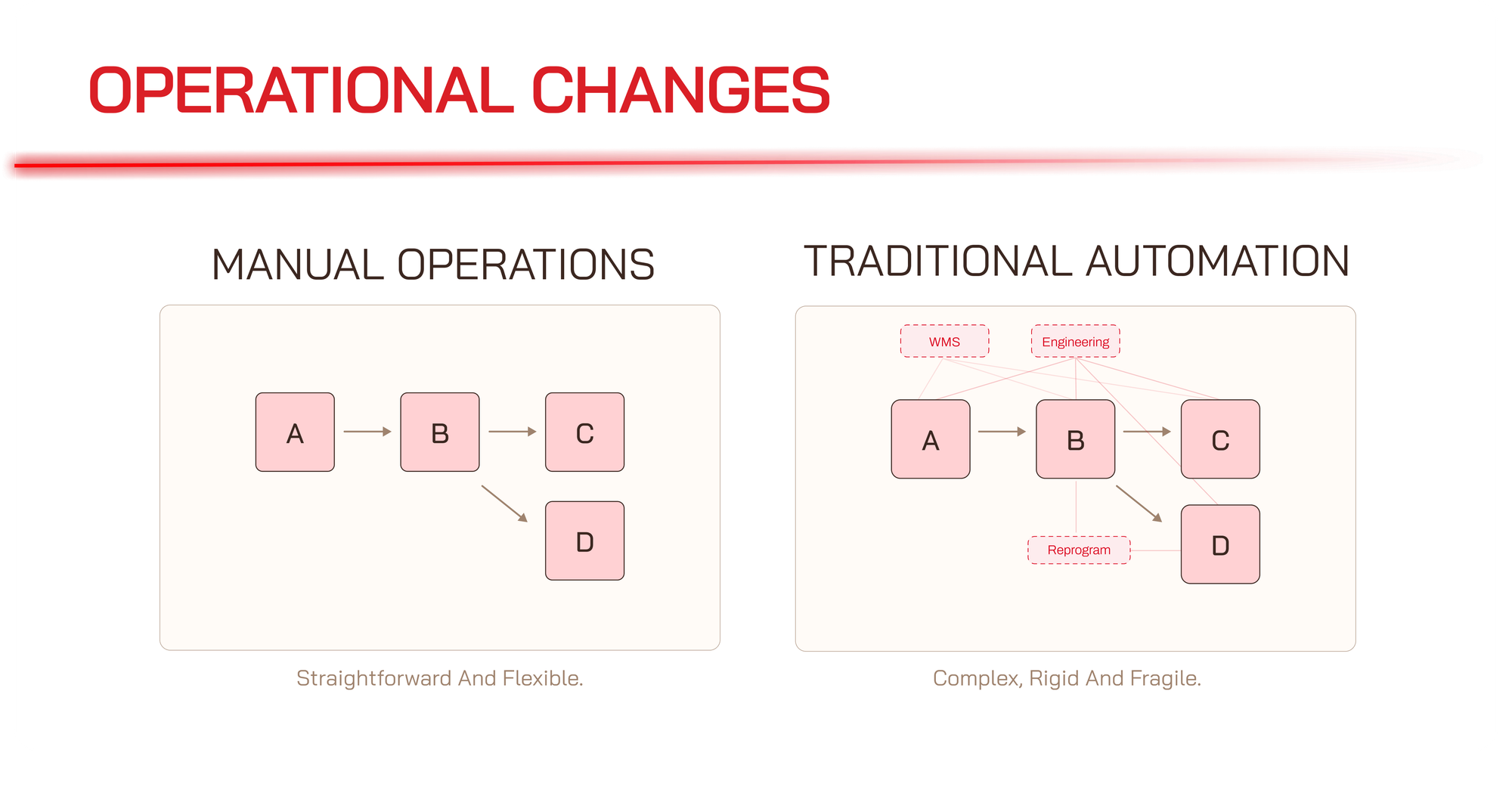
The operational problem. This is the barrier that gets less attention but kills more automation projects than anything else. Traditional systems didn’t just need a different infrastructure but they needed customized operations. Pallet types had to be standardized. Routes had to be defined. And all of this required dedicated technical staff to program, maintain, and troubleshoot — engineers and automation specialists that most mid-market 3PLs simply don’t have on payroll and can’t justify hiring. The floor team, meanwhile, had to be retrained to work around the robot’s rigid logic instead of their own flexible judgment. The operational disruption during deployment was often longer and more painful than the physical installation itself.
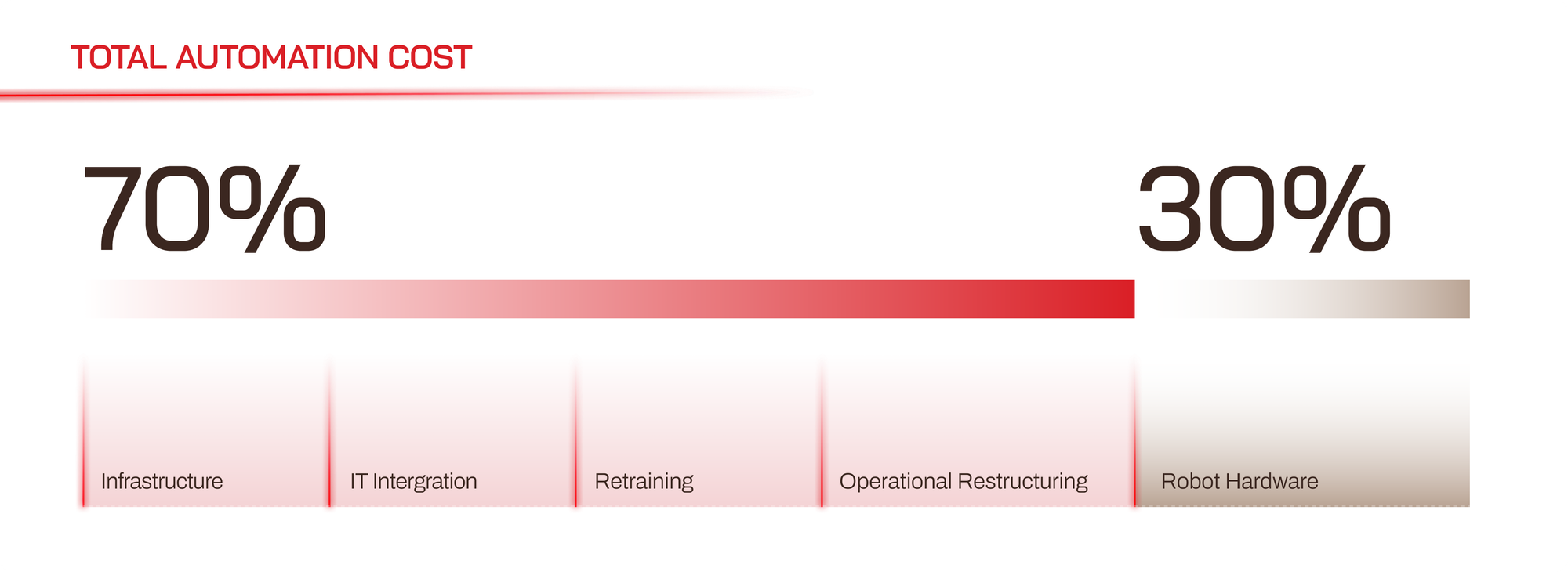
When both barriers exist simultaneously, the total cost of an automation project balloons. Industry data consistently shows that integration, deployment, and infrastructure modification costs can account for up to 70% of total automation project expense while the robot hardware itself is often a smaller line item. For a 3PL operating on thin margins with a leased brownfield facility and a workforce that’s already stretched, spending three to four times the cost of a robot just to make it work inside one application while the rest of the pallet workflow remains manual was never a viable investment.
This is why the simplest task on the floor stayed manual the longest. The technology existed to move a pallet. The economics to justify it in a real facility did not. What’s changing now isn’t the ambition but the underlying technology.
What’s Happening with Physical AI and Why It Matters for Pallet Movement
Physical AI is a broad and rapidly evolving field. At its core, it refers to AI systems that can perceive, reason about, and take action in real-world physical environments. Moving beyond the rule based programming of conventional robotics to adaptive, learning-based behavior. Where traditional industrial robots followed fixed instructions in controlled settings, Physical AI enables machines to sense changing conditions, understand context, and make decisions in environments that are unstructured, dynamic, and unpredictable. The concept spans everything from autonomous vehicles to surgical robots to humanoid systems.
For material movement in warehouses and factories, Physical AI is showing up in a very specific and practical way: robots that can see their environment, understand it, and learn new tasks. All of that without requiring the facility or the operation to change around them. That’s the application that matters for pallet movement, and it’s built on three capabilities that are already proven and working together in early deployments.
Vision. Next generation of mobile robots are utilizing cameras to build a complete, 360° real-time 3D understanding of their surroundings. They don’t follow a line on the floor or a signal from a reflector. They see the space the way an operator does — pallets, people, forklifts, obstacles, open staging areas, congested aisles, etc. and they process all of it continuously. This is what eliminates the infrastructure dependency.
Artificial intelligence. Seeing the environment isn’t enough, the robot needs to understand what it sees and adapt how it operates based on that understanding. Onboard AI models classify objects in real time, distinguishing a loaded GMA pallet from an empty USPS pallet from a person crossing its path. More importantly, AI allows the robot to adapt its actual pick and movement operations based on what it encounters: how to approach and engage a specific pallet type, how to adjust its behavior when navigating a tight aisle versus operating inside a trailer, where pallets are staged and where empty spaces indicate a drop opportunity. This operational adaptability is what can make the robot useful across an entire workflow, not just a single predefined path.
Learning from humans. Traditional automation required engineers to program every aspect of the robots, every conditional behavior. The ability to learn from the operators who already know the workflow is an impactful capability unlocked by physical AI. An operator can physically guide the robot through a task, moving it through the environment, along the route, to the pickup and drop points and in doing so teaches the robot the environment, the operation, the asset types involved, and the context of the workflow. The robot learns by being shown, not by being programmed. This is demonstration-based learning that happens in real time, on the floor, during live operations. No specialized programming. No automation engineers. No multi-month deployment timelines. The operator who moves the pallet today can teach the robot to move it tomorrow.
Why this combination has the potential to change the economics. Each of these capabilities matters on its own, but the real shift comes from what they can eliminate together. Vision removes the need for any infrastructure modification. AI removes the limitation to single, rigid use-cases, enabling the robot to adapt across different pallet types, environments, and workflow conditions without reprogramming. Learning from humans removes the need for specialized engineers, long and costly deployment cycles. Combined, they target the 70% of project cost that has historically made pallet movement automation uneconomical and they open the possibility of automating the full range of pallet workflows, not just one point-to-point movement.
The robot adapts to the operation. The operation doesn’t adapt to the robot. That’s the shift that’s underway. But what does it actually look like on the ground?
What “No Changes” Should Look Like on the Floor
The claims “no infrastructure changes” and “no operational changes” get used loosely in automation marketing. Here’s what they should actually mean and what early Physical AI deployments are demonstrating.
No infrastructure changes means the facility is physically identical before and after deployment. No construction. No floor cuts. No embedded wiring. No mounted reflectors or navigation beacons. No dedicated automation lanes. The robot operates on the same floor, in the same aisles, around the same racking as the pallet jacks and forklifts already there. If the 3PL reconfigures its floor layout next quarter, new staging zones, different dock assignments, shifted storage areas, the robot can be re-taught the environment.
No operational changes means the team’s workflows, roles, and daily routines stay intact. The routes pallets follow, the staging logic, the shift-to-shift handoff patterns — none of it gets rewritten for the robot. Training isn’t a multi-week program requiring technical staff; an operator physically guides the robot through the task and the robot learns. Multiple operating modes like fully autonomous, semi-autonomous follow-me, and manual human-guided are switchable in real time by the floor team. No one needs to assign tasks through a complex dashboard or integration layer. The robot detects pallets, detects empty spaces, and executes based on learned operational logic. And no WMS or ERP integration is required to start, the robot operates independently from day one, with system integration available as an optional addition when the operation scales.
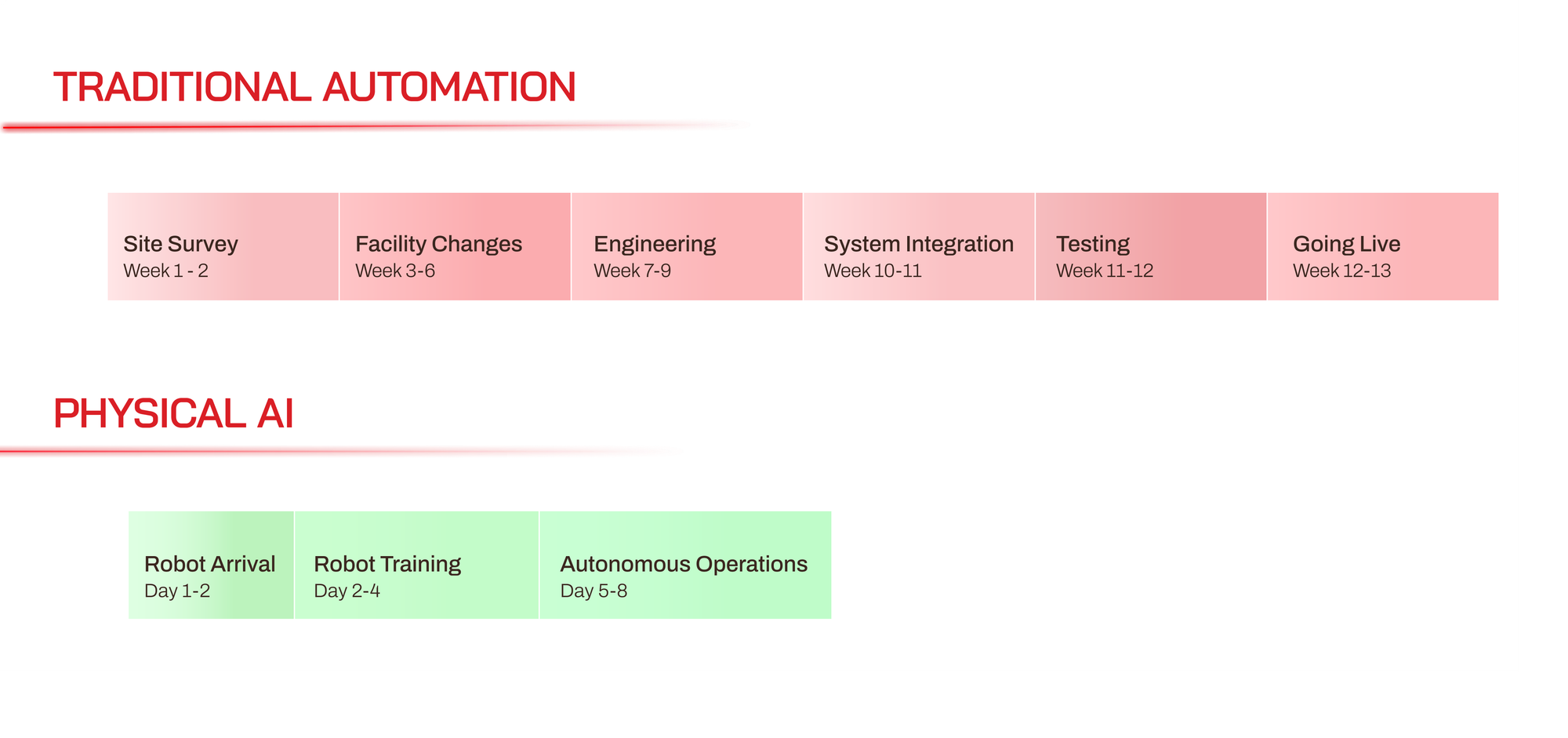
What early deployments are showing. Robots arrive. Operators guide them through the facility’s actual workflows, the same paths they walk every shift. Within hours, not weeks, the first pallet moves autonomously. Production doesn’t stop. There’s no cutover day, no go-live disruption. The robots phase into the operation alongside the existing team. When something changes or a new customer requirement comes in, a seasonal volume spike, a different pallet type entering the facility, the operator can teach the robot the new pattern.
Pallet movement is conceptually simple. Physical AI is designed to make the automation of it operationally simple too by matching the technology to the reality of how 3PLs actually operate. The question then becomes: if each individual workflow can be automated this easily, what happens as facilities begin to automate all of them?
Automating the Full Workflow to Deliver Real Value
Traditional automation failed the economics test for most 3PLs not just because of cost, but because of scope. The infrastructure and operational changes required were so extensive that a facility could typically only justify automating a single point-to-point move, for example trailer to staging, or staging to storage. While the rest of the pallet workflow stayed manual. The return on a massive implementation investment was limited to one link in the chain. But a facility doesn’t run on one link. It runs on the entire flow: pallets off inbound trailers to staging, staging to storage or sort lines, finished goods through wrapping to outbound staging, outbound to trailer loading, palletizing station replenishment, and the dozens of intra-facility transfers that individually seem trivial but collectively consume hours of operator time per shift.
Physical AI has the potential to automate this full chain progressively, not because each workflow gets its own implementation project, but because each new workflow is just another skill to the same robot. A robot that has learned inbound unloading to staging can learn staging to storage. Finished goods to wrapping to trailer loading can become a single learned job, not three separate fixed paths. Station feeding can happen based on learned operational logic, not WMS task assignments. No additional infrastructure. No additional integration cost. As facilities begin to expand from initial deployments to broader pallet workflow coverage, the economics should scale linearly with the number of robots deployed, not exponentially with the number of use-cases automated.
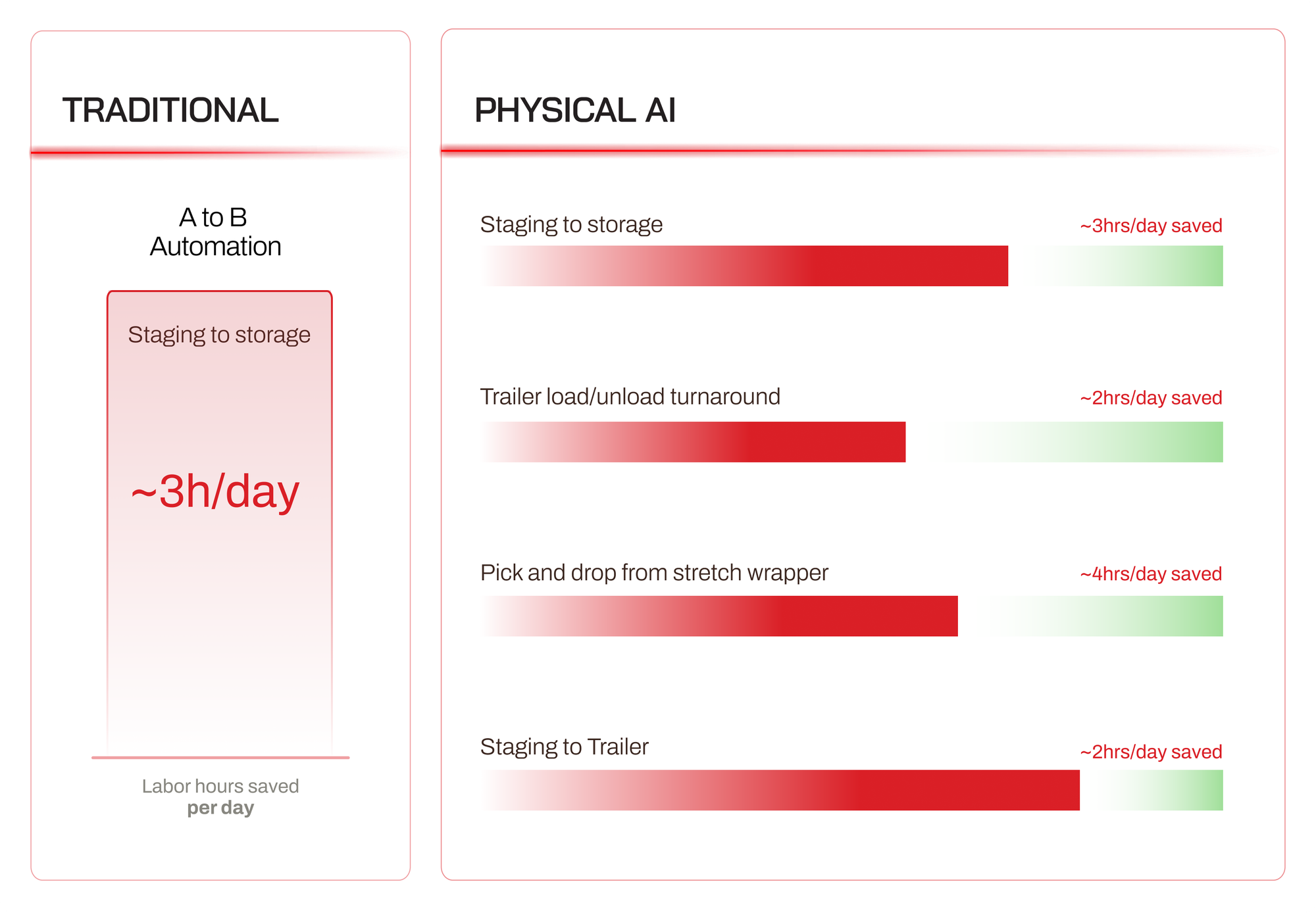
Measuring that value. As Physical AI powered pallet movement matures, the impact won’t be captured by measuring labor hours replaced on a single route but the real measure will be the compounding throughput effect across the full workflow. When inbound, staging, storage, wrapping, and outbound all move at the pace of autonomous operation rather than manual pallet jacks, a facility’s overall throughput capacity can increase without adding headcount, square footage, or shifts. The right way to evaluate it is at the operational level: pallets moved per shift across all workflows, operator hours freed for higher-value tasks, trailer turnaround time, and cost per pallet moved end to end. A solution that automates one link at high cost will show marginal improvement on a narrow metric. A solution that progressively automates the full chain at low incremental cost per workflow will show up in the numbers that actually drive the business total facility throughput, labor cost as a percentage of revenue, and the ability to absorb volume spikes without scrambling for temp labor.
Conclusion
For years, pallet movement has occupied a strange position in warehouse and logistics operations: universally recognized as the lowest-hanging fruit for automation, yet almost never automated in practice. The technology to move a pallet autonomously has existed. The economics to justify it inside a real brownfield 3PL facility have not.
That equation is changing. Physical AI is eliminating the two compounding barriers that have kept pallet movement manual: the requirement for infrastructure changes and the requirement for operational changes. Mobile robots that see their environment, understand what they’re looking at, adapt their operations to what they encounter, and learn new tasks from the people already doing the work. Capable of deploying in hours, not months, and expanding across the full pallet workflow one demonstration at a time.
This is what we’re building at Peer Robotics. The Peer 3000 is designed around the principles in this article: 360° vision, onboard AI that adapts pick and movement operations to what it encounters, and demonstration-based learning that lets your operators, not engineers. It handles GMA, EUR, CHEP, and custom pallets at real-world industrial payloads, operates in fully autonomous, follow-me, and manual modes, and deploys into brownfield facilities without touching the floor or the workflow. If the gap this article describes is one you recognize in your own operation, we’d welcome the conversation.
FAQ
Q: How can pallet movement be automated in a warehouse?
A: Pallet movement can be automated with autonomous robots that move pallets between workflows without fixed infrastructure. These systems navigate existing warehouse environments and adapt to live operations.
Q: What is Physical AI in warehouse automation?
A: Physical AI in warehouse automation refers to systems that can perceive, reason, and act in real-world environments. In pallet movement, that means operating safely and adapting to changing warehouse conditions.
Q: Can pallet movement be automated without infrastructure changes?
A: Yes, many modern pallet automation systems can operate without infrastructure changes. That means no floor modifications, embedded wires, reflectors, or dedicated automation lanes.
Q: Can brownfield warehouses automate material movement?
A: Yes, brownfield warehouses can automate material movement using systems designed for existing facilities. Modern automation works within current layouts and workflows instead of requiring major retrofits.
Q: What does “no operational changes” mean in autonomous pallet movement?
A: “No operational changes” means the warehouse does not need to redesign its workflows for the automation to work. The robot adapts to existing processes, handoff points, and traffic patterns.
Q: What is an AI-powered pallet jack?
A: An AI-powered pallet jack is an autonomous vehicle that picks up and moves pallets in real warehouse environments. It uses onboard perception and software to operate in dynamic spaces without fixed guidance infrastructure.