Trailer Unloading: The Most Labor Intensive Hour on Your Dock

Why trailer unloading remains one of the hardest warehouse operations to automate, and how the Peer3000 is solving it in brownfield facilities without changing the building.
For most warehouses and distribution centers, trailer unloading is where the day starts and where the problems compound. A standard 53-foot trailer carries 20 to 26 pallets, and every one of them must come off the trailer, cross the dock plate, and reach staging before the next trailer can back in. The clock is unforgiving. High performing facilities aim to keep a live load at the dock for 60 to 90 minutes, while congested docks routinely stretch past three hours. Carriers start billing detention at roughly $50 to $100 an hour once the free window, usually two hours, runs out. And the work itself is one or two operators on a manual pallet jack, moving every load by hand.
The injury exposure is concentrated here. Loading docks are the most dangerous area of the warehouse, accounting for roughly a quarter of all warehouse injuries. The people doing the work carry some of the highest injury rates of any occupation, most often from the sprains, strains, and overexertion that come with lifting and lowering loads shift after shift.
High-turnover staffing makes the problem worse. Warehouse turnover runs near 40 percent a year, and higher in third party logistics, among the highest of any industry. Labor is also the dominant cost on the floor, accounting for 50 to 70 percent of total warehouse operating expense. That combination creates a familiar bind at the dock: the most physically punishing job is often staffed by the newest people, who carry the least familiarity with dock hazards, and every departure resets the clock.
Then there is the volume problem. Inbound trailer counts swing two to three times between off peak and peak. People absorb that swing by flexing across tasks, unloading in the morning, feeding production in the afternoon, handling outbound by evening. That flexibility is exactly why the dock has been so hard to automate. It does not run at a constant, predictable load, so automation has to handle the variability in volume, not just the mechanics of moving a pallet.
Every facility that receives goods on pallets faces this problem multiple times a day. Solving it takes two things: automation that works inside a building never designed for robots, and a way for that automation to run safely alongside the people still on the floor. This is why Peer Robotics has joined the NVIDIA Halos AI Systems Inspection Lab, part of NVIDIA’s new Halos for Robotics safety system, to bring outside in safety to autonomous trailer unloading.
Why Trailer Unloading Is Especially Hard in Brownfield Facilities
Most US facilities receiving trailers are brownfield operations: existing buildings, often decades old, that were never designed for automation. The docks have uneven dock plates, inconsistent trailer heights, limited staging space, narrow aisles, aging floors, and mixed pedestrian and forklift traffic sharing the same paths.
The fundamental constraint is that operations cannot stop for an automation project. The dock must keep running. Floors cannot be resurfaced to install reflectors. Staging areas cannot be reconfigured into dedicated automation zones. There is no room for conveyors or fixed infrastructure at the dock face. The building is what it is, and whatever automation arrives has to work within those conditions from the first shift.
That rules out most traditional approaches. Systems that require integration projects, floor preparation, magnetic tape, dedicated lanes, or environments mapped in advance do not fit a brownfield dock. The building was built for people with pallet jacks and forklifts, and it has to keep serving that function while automation proves itself. Those systems expect the building to bend to the robot. The Peer3000 works the other way around, reading the dock as it is and adapting to it.
Within that reality, the trailer itself adds a distinct set of challenges that operators handle intuitively but robots struggle with.
Lighting. Trailers are dark cavities. The dock door is often the only source of light, creating extreme contrast between the interior shadow and the brightness outside. Brownfield docks rarely add supplemental trailer lighting, and the conditions shift through the day as the sun moves. A perception system must handle that gradient continuously, not just in a controlled demo.
Floor transitions. The dock plate between the facility floor and the trailer bed introduces elevation changes, gaps, and surface shifts. Older docks have worn plates and uneven levelers. The trailer itself settles on its suspension as weight comes off, so the floor the robot sees at pallet 1 is not the floor it meets at pallet 20.
Unstructured and unpredictable. Every trailer is a surprise. Pallets arrive overloaded, damaged, unevenly stacked, and inconsistently wrapped, with GMA, EUR, and disposable pallets mixed in the same load. Transit shifts cargo, topples boxes, and leans loads against each other. You open the door without knowing what you are getting, and the scene changes after every pick, because removing one pallet alters the geometry around the rest.
No margin for slow starts. Turnaround is the metric, and dock appointments are measured in minutes. A robot that needs weeks of commissioning or programming tied to one site does not solve the problem, it adds another. The automation must be productive within days.
These are not edge cases for a future software update. They are the baseline conditions of every trailer at every brownfield dock. And new conditions keep appearing: a pallet type the system has never seen, an unusual load configuration, a floor that deteriorated since last week. Automation for brownfield docks has to handle what exists today and keep improving as new conditions emerge.
How the Peer3000 Approaches Trailer Unloading
Vision First Intelligence, Context Over Sensing: While developing the Peer3000, we made a deliberate decision to build a vision first autonomous system. We held a strong conviction that real scalability and safety on a busy warehouse floor cannot come from forcing a robot to rely on blind sensors or rigid paths. It needs to perceive the world the way a human operator does. That is what Physical AI looks like on a dock, a machine that sees, makes sense of what it sees, and acts on it, in a space that was never structured for a robot.
By anchoring our stack in computer vision, the Peer3000 moves material in a scalable and safe way, and unlocks a range of context aware applications, including damage detection at the point of entry, real time asset tracking, and automated barcode scanning.
Zero Infrastructure, Zero Operational Changes: The six onboard cameras on the Peer3000 give a complete, 360 degrees understanding of the environment, so the robot reads the dock floor with human like spatial awareness. To make sure it works in the darkest corners of a facility, we built in active onboard lights, which means it has no reliance on dock or trailer infrastructure. It can roll into a dark, pitch-black container and map its surroundings immediately, with no retrofitted warehouse lighting.
With that, the autonomous pallet jack can pull up to a dock, navigate the trailer bed, secure the load, stage it outside, or move it straight to storage, all with zero infrastructure modifications, zero operational disruptions, and zero additional programming.
How People and Robots Work Together: Building a robot that can navigate a dark trailer is an impressive engineering feat, but if the people on the floor cannot use it easily, the technology stays trapped in the lab. In the fast moving, unpredictable world of inbound logistics, the way people and robots work together is what turns an advanced machine into a tool a team can deploy. We designed the Peer3000 around a clear principle: automation should adapt to the workforce, not the other way around.
• Takeover without a mode switch. There are no software lockouts, hidden override menus, or toggles between manual and autonomous modes. If an operator needs to adjust a pick or clear a path, they grab the handle and take control. The robot yields to them instantly and behaves exactly like a manual pallet jack.
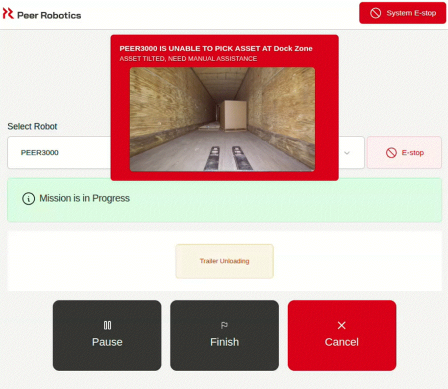
• Visual, actionable feedback. When the robot hits a rare situation, it cannot resolve on its own, it does not throw a cryptic error or stall blindly. The onboard display and the facility UI both give operators clear visual feedback and tell them what is happening. The team sees exactly what the machine sees, a blocked path or a shifted pallet, and can step in to clear it right away.
ROI and Turnaround Time: The Inbound Equation
When they evaluate dock automation, logistics leaders often treat return on investment and operational speed as two separate metrics. On a live inbound dock, that separation is a mistake. The two are tightly linked.
A robotic solution with an attractive ROI on paper that cannot hit the throughput a facility needs is operationally irrelevant. The dock still chokes on carrier detention fees, disrupted schedules, and backed up staging lanes. A very fast robot with a capital cost that cannot be justified never makes it past the CFO. To automate trailer unloading, a system has to solve for cost and speed at the same time.
What Actually Drives Speed: On an inbound dock, speed is often misunderstood. It is not raw mechanical velocity. A robot with a high-top speed that freezes the moment it meets a torn piece of shrink wrap, an offset pallet, or an uneven dock plate is not fast, it is an expensive bottleneck. Real speed comes from being effective across the conditions a dock throws at you.
• Fewer interventions mean faster turnaround. Every hard stop that forces an operator to clear a fault drags cycle times down.
• Autonomy beats top speed. A pallet jack that handles tough floor conditions on its own, without stopping, is faster across a shift than a machine that moves quickly but needs frequent rescue.
The Compounding Performance Curve: Consistency like that shapes the financial picture. Because the Peer3000 runs on a vision first learning architecture, it gets better the longer it works. The first trailer it unloads at your facility will be its slowest. By the hundredth, it is meaningfully faster. As it meets real floor variance, resolves situations with operators, and learns your operational patterns, its efficiency climbs. As throughput rises, cost per pallet falls, so the economics of the Peer3000 keep improving the longer it stays on your floor.
Every Trailer Teaches the Next One
The compounding curve that drives faster turnaround is not magic. It is the result of a disciplined, team driven learning loop. This is the part of Physical AI that separates it from programmed automation: the system improves with experience, the way an operator does, not only when someone ships new code.
When the robot meets an unfamiliar edge case on the dock, it runs a structured process: encounter, capture, review, improve, deploy. This is not a machine making assumptions on its own. Edge case data is captured, reviewed by our engineering team, and used to fine tune our vision and navigation models. Those updates do not wait for a slow quarterly release. Improved models go back to the field quickly, often within the same week, so your fleet adapts at the speed of your business.
• Interventions as learning signals. In legacy automation, a human stepping in is a failure that kills throughput. With the Peer3000, a human takeover is the most valuable data point there is. When an operator grabs the handle to clear a situation, the robot logs the exact condition, a splintered pallet or hanging shrink wrap, the spatial context, and the decision the operator made to solve it. That turns frontline intuition into model improvements we can act on.
• Compounding across different sites. Simulation cannot reproduce the messy reality of a live floor. A clean food grade facility teaches the platform different things than a rugged automotive plant. A brand-new dock plate offers different lessons than a warped, decades old steel one. Because the Peer3000 learns across every deployment, the whole platform keeps getting better.
The distinction is simple. A traditionally programmed machine can only do what it did yesterday. An intelligent platform is built to handle more of what tomorrow brings.
Safety Comes First
Nothing on a dock matters more than the people working on it. Before the Peer3000 moves a single pallet faster, it must move it safely, every time, around anyone who shares the floor. That is the first principle the system is built on, not a feature added at the end.
Today, that safety is ensured the way functional safety has always been ensured on a factory floor. The robot is engineered to fail safe. For trailer unloading, that means the work happens in a constrained area the robot has to itself, a defined zone at the dock that is typically barricaded off while the robot operates. The moment a person crosses into that zone, the robot goes into an emergency stop. It is the conservative behavior that functional safety standards call for, and it protects people reliably.
That approach is right, and it is the baseline anyone deploying automation should expect. But it carries a cost that everyone who has run robots on a busy dock knows. Every time someone crosses the line the robot stops, and on a dock measured in minutes that lost time adds up fast. Just as limiting, the zone the robot needs is a zone people cannot share, so a stretch of the floor is closed to the team for as long as the robot is working. The reason the rule must be this strict comes down to one thing: visibility. A robot working deep inside a trailer cannot see what is happening in the operational area outside it, and even out on the dock its view is often blocked, by the pallet on its forks, by a forklift crossing the aisle, by the corner of the trailer or a stack of staged loads. When the robot cannot see, the only safe assumption is the cautious one. The barricade and the emergency stop are not overcaution, they are the honest response to a robot that can only act on what it sees from its own body.
The way forward is to give the robot more to see, not less to do. Outside-in safety extends perception beyond the robot's own sensors, using infrastructure cameras already mounted in the building and AI agents that read the whole operating area in real time. At a loading dock that means the system can see a person entering or leaving the zone, understand the context, and adjust the robot's operating mode instead of defaulting to a stop. It can tell a worker walking past from a worker stepping into the robot's path. To solve this industry challenge, NVIDIA Halos Outside-In Safety Blueprint provides developers an open source architecture to deploy safety agents across industrial environments’ camera infrastructure. The robot holds full safety when people are present and runs at full efficiency when the area is clear, switching between the two as the situation changes, so the floor no longer must be barricaded for people and robots to share it.
This is the work Peer Robotics is taking on as a member of the NVIDIA Halos AI Systems Inspection Lab. The outside in layer runs on NVIDIA IGX in the facility and is being built toward certifiable functional safety standards such as IEC 61508 and ISO 13849, alongside emerging standards for the safety of physical AI. The goal is simple: reach the functional safety the barricade gives us today without the barricade, so autonomous unloading can run at full pace in a shared space, and a dock never has to choose between keeping people safe and keeping the work moving.
The Dock Door Is Open
Trailers are not going to get easier to unload. Loads will not become more standardized. Labor will not become more abundant. And docks will not get safer by themselves.
The severity of the problem is not going away. But the ability to address it, inside existing facilities, without changing the building, without stopping operations, without requiring robotics expertise on staff, is here now.
The Peer3000 is doing this work today, running trailer unloads at customer sites within a week of arrival, handling the lighting, the floor transitions, the pallet variation, and the surprises that come with every trailer door opened. It learns from every intervention and gets faster and more capable with each deployment, because it is built as a Physical AI system rather than a fixed program. The learning loop means it does the job better tomorrow than it does today, and the path toward open, collaborative safety means the constraints that exist now will not exist forever.
If trailer unloading is consuming your team’s best hours and your dock’s safety margin, we would welcome the conversation. Learn more about the Peer3000 or reach out to discuss what the first week would look like in your facility.